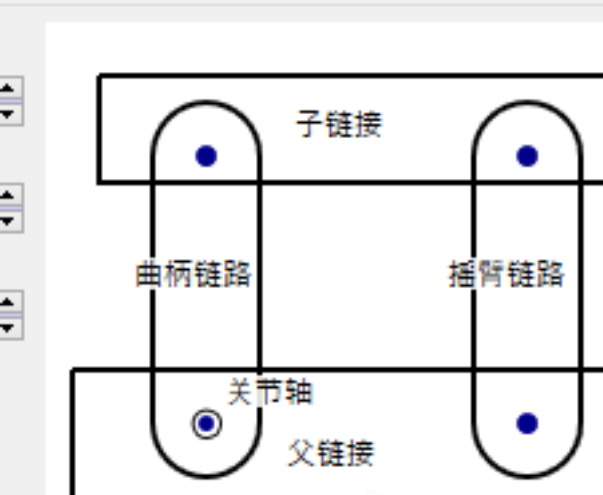
1.机器人编程制作四连杆机构,四连杆是一种常见的机构,其中曲柄摇杆机构是指具有一个曲柄和一个摇杆的铰链四杆机构。通常,曲柄为主动件且等速转动,而摇杆为从动件作变速往返摆动,连杆作平面复合运动。曲柄摇杆机构中也有用摇杆作为主动构件,摇杆的往复摆动转换成曲柄的转动。如上图所示。
2. 如何制作一个这样的四杆机构?
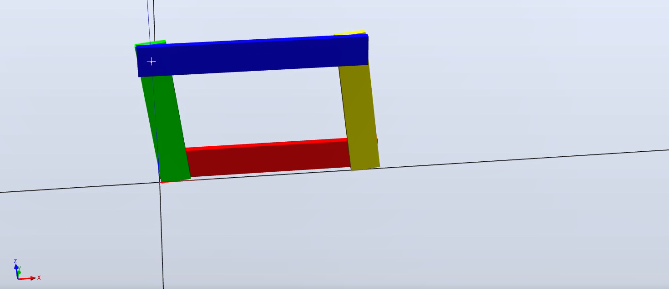
3. 通过robotstudio的建模-固体,创建如下图的四个连杆
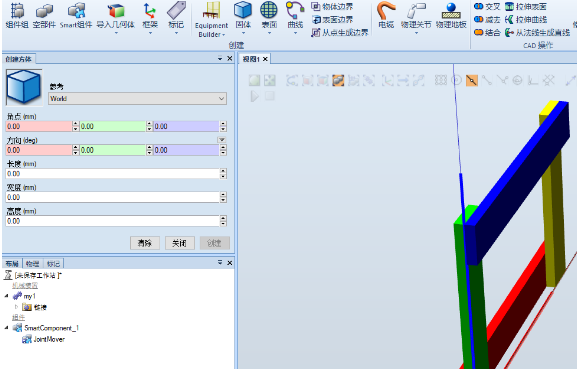
4. 点击“建模”下的 ,类型选择“设备”
,类型选择“设备”
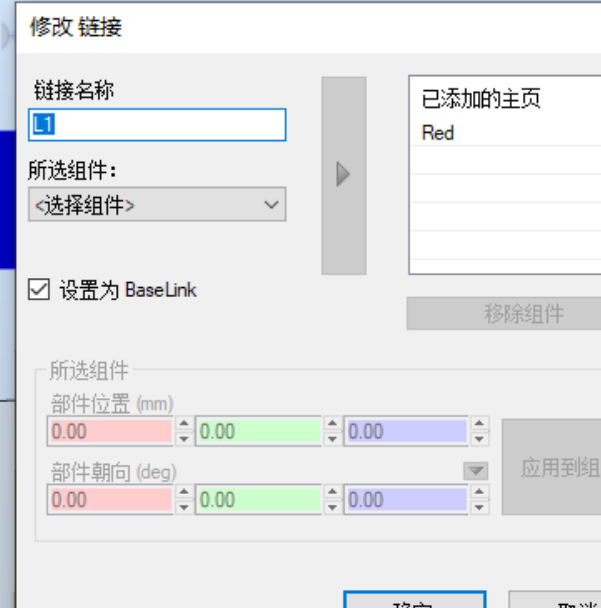
5. 右击,添加链接
6. 参照下图进行设置,例如这里将底部的红色设为BaseLink,并添加其他三个链接
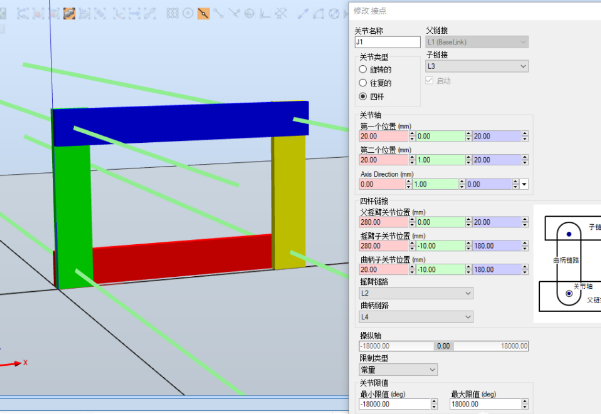
7. 右击添加“接点”
8. 按照提示设置各自旋转参考点以及曲柄的旋转上下限。注:完成后,只可拖动曲柄,摇杆跟随往复运动。
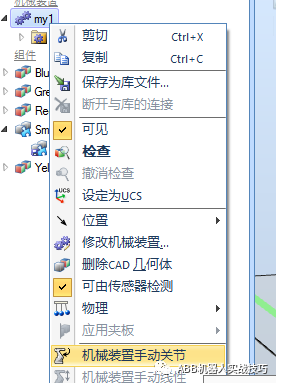
9. 完成后点击“编译机械装置”,此时可以右击机械装置进行测试。